 сделать главной
сделать главной добавить в закладки
добавить в закладки
Роботы-манипуляторы: Руки, Преобразующие Мировую Промышленность
В современном мире, где точность, скорость и эффективность являются залогом успеха, на первый план выходят технологии, кардинально меняющие привычные процессы. Среди них особое место занимают роботы-манипуляторы. Эти сложные механические «руки» уже давно перестали быть атрибутом футуристических фильмов и прочно обосновались на заводах, в лабораториях, логистических центрах и даже в быту, становясь незаменимыми помощниками человека. Именно роботы-манипуляторы составляют основу автоматизации, беря на себя задачи, непосильные, опасные или просто рутинные для человека.
Что такое робот-манипулятор?
Робот-манипулятор — это автоматическое устройство, состоящее из последовательности звеньев (механических «костей»), соединённых между собой кинематическими парами (шарнирами), образующими так называемую кинематическую цепь. По своей сути, он模仿рует строение и функции человеческой руки, но часто превосходит её по многим параметрам: силе, точности, выносливости и способности работать в опасных для человека условиях. Завершается манипулятор рабочим органом или захватным устройством (эффектором) — это может быть схват, сварочный горелка, шлифовальный круг, отвертка, кисть для покраски или медицинский скальпель.
От механической руки до интеллектуального помощника: Немного истории
Первый в мире программируемый манипулятор «Универсат» был разработан американским изобретателем Джорджем Деволом в 1954 году. Вместе с инженером Джозефом Энгельбергером они основали компанию «Unimation» и установили первого промышленного робота на заводе General Motors в 1961 году. Он выполнял простейшую, но монотонную и опасную работу — переносил горячие детали литья под давлением. С тех пор технологии ушли далеко вперёд. От примитивных устройств, выполнявших цикличные действия, манипуляторы эволюционировали в высокоинтеллектуальные системы, оснащённые системами технического зрения, тактильными сенсорами и сложным программным обеспечением, позволяющим адаптироваться к изменяющимся условиям.
Устройство и классификация: Как устроена «умная» рука
Конструктивно любого робота-манипулятора можно разделить на несколько ключевых компонентов:
-
Исполнительный механизм («рука»): Состоит из звеньев и приводов (электрических, пневматических или гидравлических), которые приводят его в движение.
-
Система управления («мозг»): Микропроцессор и программное обеспечение, которые на основе заложенной программы или данных с датчиков рассчитывают траекторию движения и управляют приводами.
-
Сенсорная система («органы чувств»): Датчики положения, скорости, силы, зрения и касания, которые предоставляют системе информацию об окружающем мире.
-
Рабочий орган (эффектор): Инструмент, непосредственно выполняющий задачу.
Классифицируют манипуляторы по различным признакам, но одним из основных является тип кинематической схемы:
-
Декартовые (Портальные): Имеют три линейные оси перемещения (X, Y, Z). Очень жёсткие и точные, используются в станках ЧПУ, сборке микроэлектроники.
-
Цилиндрические: Сочетают вращательное и линейное перемещение. Используются реже, обычно для простых операций.
-
Сферические: Имеют две вращательные и одну линейную оси.
-
Антропоморфные (шарнирные, Articulated): Наиболее распространённый тип, напоминающий человеческую руку. Имеют несколько вращательных сочленений (обычно 6 осей), что обеспечивает им высокую гибкость и подвижность. Именно такие роботы чаще всего встречаются на сборочных линиях.
-
SCARA: Специализированные манипуляторы для сборки и монтажа. Имеют жёсткую конструкцию в вертикальной плоскости и подвижную в горизонтальной, что идеально для быстрых и точных операций по вставке деталей.
Сферы применения: Где трудятся механические руки
Области применения роботов-манипуляторов невероятно широки и продолжают расширяться:
-
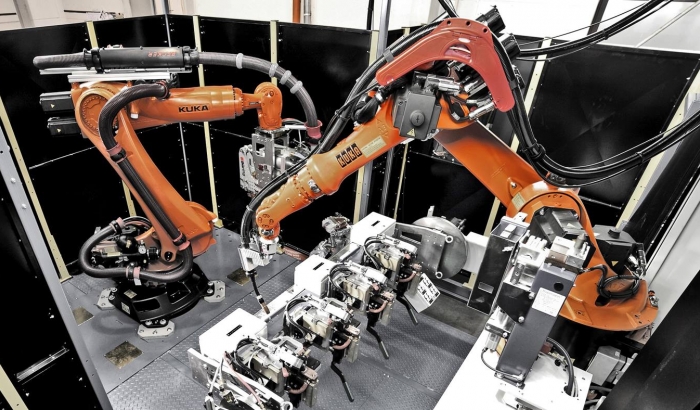
Автомобилестроение: Классическая и самая массовая сфера. Здесь роботы варят кузова, окрашивают их, устанавливают стекла и двигатели, выполняют сотни других операций.
-
Машиностроение и металлообработка: Сварка, резка, гибка, фрезеровка, лазерная обработка металлов.
-
Пищевая промышленность: Упаковка, сортировка, паллетирование продуктов, разделка туш.
-
Фармацевтика и медицина: Сборка микросхем, работа в стерильных условиях, упаковка таблеток, а также проведение хирургических операций (например, система Da Vinci).
-
Электроника: Монтаж печатных плат, сборка smartphones, тестирование микросхем.
-
Логистика и складирование: Паллетирование, сортировка посылок, погрузо-разгрузочные работы.
Будущее за коллаборацией
Современный тренд — это развитие коллаборативных роботов, или коботов. В отличие от традиционных промышленных гигантов, работающих за защитным ограждением, коботы спроектированы для безопасного взаимодействия с человеком в одном рабочем пространстве. Они оснащены датчиками, которые останавливают движение при случайном контакте, и могут быть легко запрограммированы оператором без глубоких знаний в робототехнике. Это открывает двери для автоматизации для малых и средних предприятий.
Роботы-манипуляторы стали краеугольным камнем Четвёртой промышленной революции (Индустрии 4.0). Они не просто заменяют человека на монотонных и тяжелых операциях, но и выводят производство на качественно новый уровень, обеспечивая недостижимую ранее точность, стабильность и гибкость. По мере развития искусственного интеллекта и сенсорных технологий эти «механические руки» станут ещё более ловкими, восприимчивыми и автономными, продолжая преобразовывать мир вокруг нас, беря на себя всё более сложные и творческие задачи.